









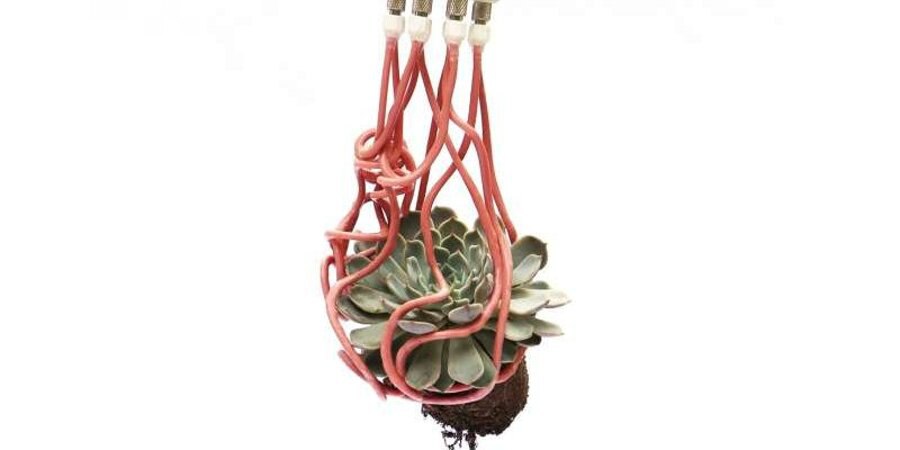
 Робоупальце можно использовать для захвата и удержания разных предметов (Фото:Гарвардская лаборатория микроробототехники)
Робоупальце можно использовать для захвата и удержания разных предметов (Фото:Гарвардская лаборатория микроробототехники)Вдохновлялись осьминогами. В Гарварде создали робота для захвата предметов — видео
Исследователи из Гарвардской школы инженерии и прикладных наук имени Джона А. Полсона (SEAS) разработали новый тип мягкого роботизированного захвата, который работает подобно щупальцу осьминога.
Робощупальце состоит из множества тонких волокон, которые сплетаются в подвижную роботизированную ткань и надежно хватают и удерживают предметы.
«С помощью этого исследования мы хотели переосмыслить то, как мы взаимодействуем с объектами, — говорит Кейтлин Беккер, бывший аспирант и научный сотрудник SEAS и ведущий автор статьи. — Используя преимущества естественной податливости мягкой робототехники, мы разработали захват, который работает эффективнее, чем все его части по отдельности».
Исследователи использовали моделирование и эксперименты, чтобы проверить эффективность захвата. Они поднимали разные предметы, включая комнатные растения, игрушки, предметы неправильной формы вроде посуды, и даже мягкие фрукты и овощи. Последнее делает робощупальце перспективным для применения в сельском хозяйстве.
Разработка инженеров из Гарварда была оценена по достоинству другими учеными.
«Этот новый подход к роботизированному захвату дополняет существующие решения, заменяя простые традиционные захваты, требующие сложных стратегий управления, чрезвычайно податливыми и морфологически сложными нитями, которые могут работать с очень простым управлением», — говорит Роберт Вуд, профессор инженерии. — Это расширяет диапазон применения роботизированных захватов".
Читать далее